Public Domestic
The Public Domestic project documents how improvised interventions have reformatted domestic spaces with a focus on people in the American Southwest.Over the past several years, in part stemming from the pandemic and mitigation measures, many of the shifts to daily life took place not in the public sphere but in private homes. Ad-hoc responses, mutual aid, and mediatized life-at-home altered the conditions of domestic interiors. This exhibition is part documentary, cataloging shifting conditions of living and relationships to the home, and part imaginative, projecting forward how shared domestic infrastructure might radically redefine visions of resilient neighborhoods.
College of Design, University of Oregon in Portland
January - June, 2024



Project Leads:
Gabriel Fries-Briggs
César A. Lopez
Project Assistants:
Courteney Begay
Antolin Gervacio
Lance Parisot
Marisa Trujillo
With support from The University of New Mexico, Center for Regional Studies and UNM School of Architecture + Planning
Gabriel Fries-Briggs
César A. Lopez
Project Assistants:
Courteney Begay
Antolin Gervacio
Lance Parisot
Marisa Trujillo
With support from The University of New Mexico, Center for Regional Studies and UNM School of Architecture + Planning

Above photo by Awar Meman, awarmeman.com

Above photo by Awar Meman, awarmeman.com

2022 - 2024


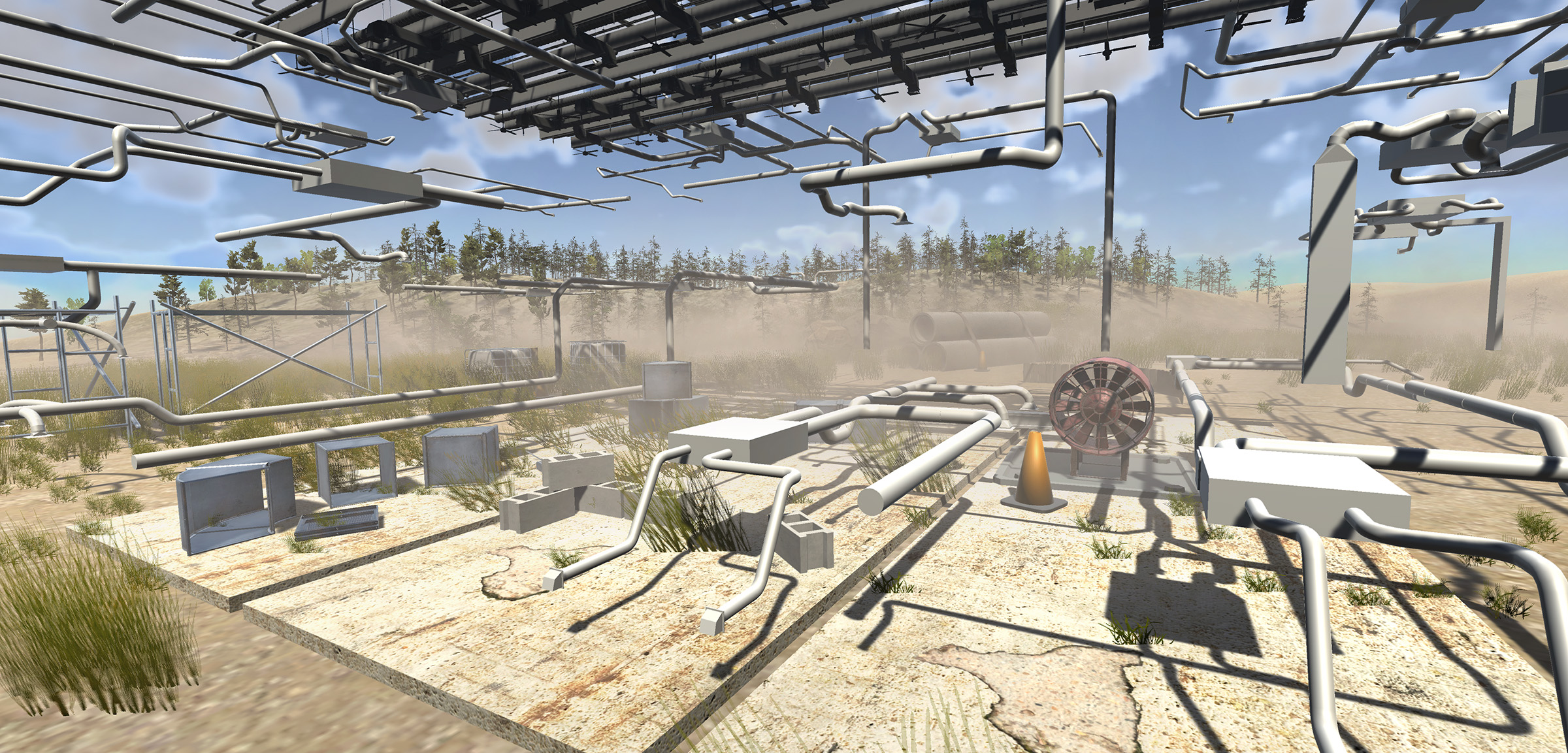
Dune Ducts
This installation exploits the effects of imaging to reshuffle landscape, environment, and building systems. A ductscape acts as a prosthetic device for a gallery’s HVAC system. A reshuffling of conventional MEP equipment inserts a vision of air as reflected landscape, amplifying existing systems for tempering and conditioning the architectural exhibition venue.
Perloff Gallery, UCLA AUD, Los Angeles




Dune Ducts draws on desert scenery as already commodified landscapes—widely distributed images of nature that serve as a backdrop to common computing platforms. The image of a duct-as-dune interprets the ceiling as an environment full of labor, design, and perhaps delight, or, at the very least, comfort. It considers the overhead site as a productive plenum for architectural positions.


Dune Ducts is presented as half of Superposition, a joint exhibition with Katy Barkan installed in the gallery at Perloff Hall in the Department of Architecture and Urban Design at UCLA. The joint exhibitions share an interest in the threshold between architectural objects and their spatial corollaries, skirting a clear boundary between the production of things and the production of environments. Superposition, as a model of working, does not attempt to resolve or reconcile. Rather, it serves as a counterpoint to the paradigms of synthesis and juxtaposition. The overlay of multiple categories of work and multiple authors allows for errors, transpositions, and irresoluble differences.

Fall 2019


Condition Exchange Unit
Condition Exchange Unit connects histories and futures of air management through interactive projections of a digital environment. Simulated environments create a bounded terrain to visualize our mechanically conditioned world and speculate on collective and planetary futures. With the buildings stripped away, exposed vents, ducts, mechanical systems, and a series of environments construct an ecology of air. The installation invites people to consider ways we condition and relate to atmospheric systems.


Exhibited in “Regenerative Actions”
Roswell Museum
April - October 2024
Roswell Museum
April - October 2024
2023 - 2024
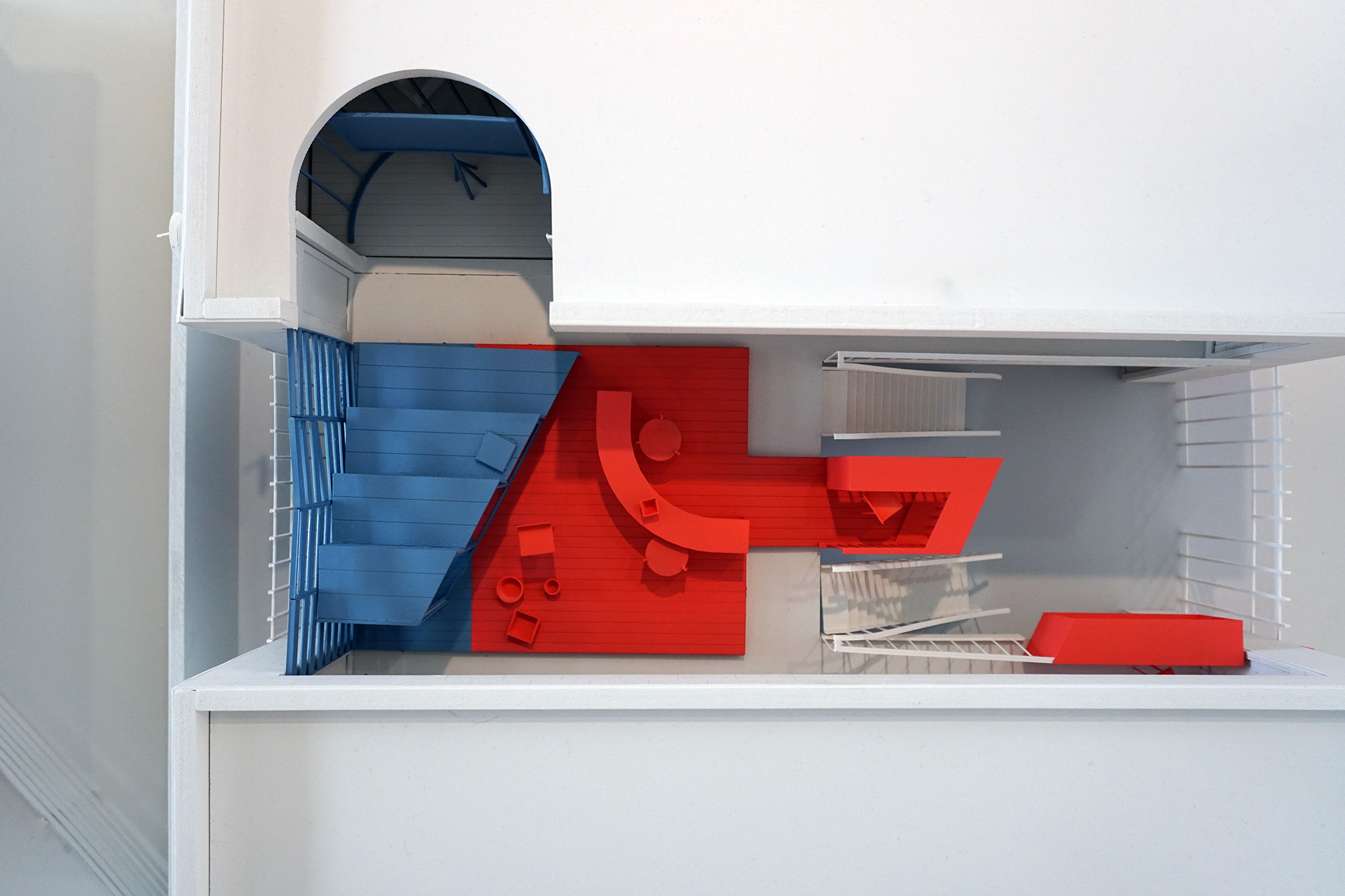
Patch & Fill

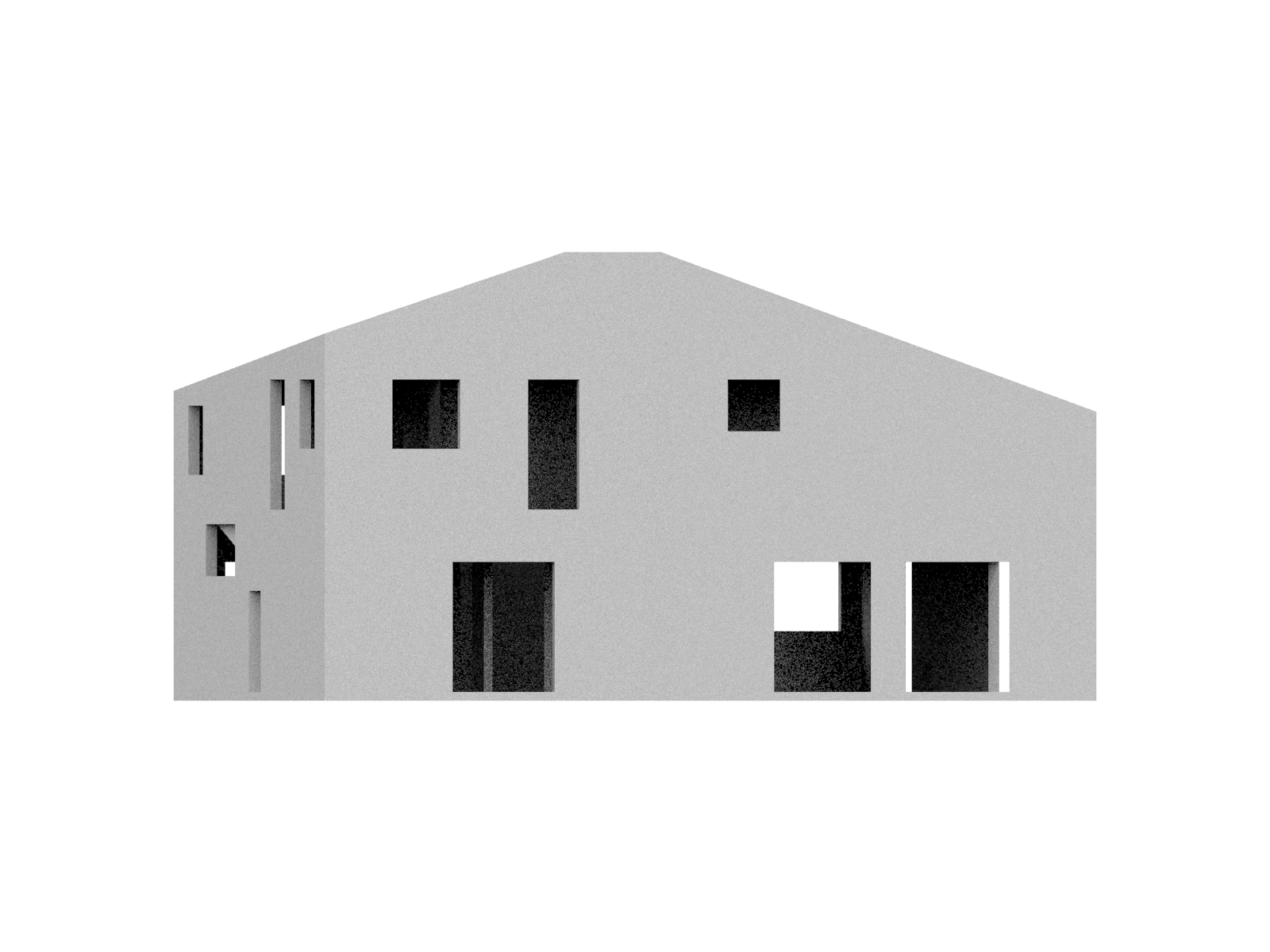

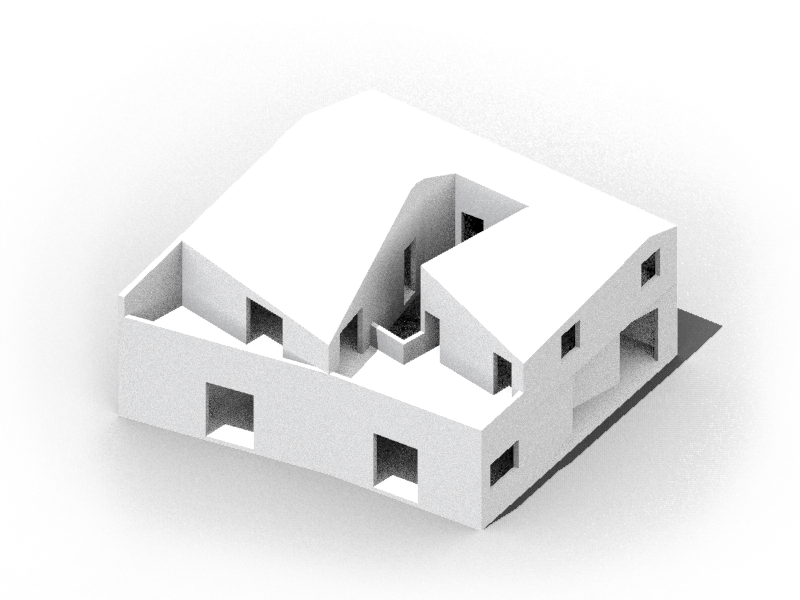
The Patch & Fill dwelling materializes overlapping forms of collective living. Over the past year, the demands of working from home (for those fortunate to do so) and households of simultaneous tele-activities posed challenges to the communal occupation of space. Architectural habits like the open floor plan require a constant negotiation of activities. Rather than minimize the negotiations of collective living, this house revels in them. The communal residence navigates the individual within the collective with a fluctuating series of overlays, openings, and boundaries. The overlapping parts and shared social spaces are legible in three distinct material systems: CMU (concrete masonry units), SIPs (structurally insulated panels), and stud frame construction.
With William Lyons
2020
With William Lyons
2020




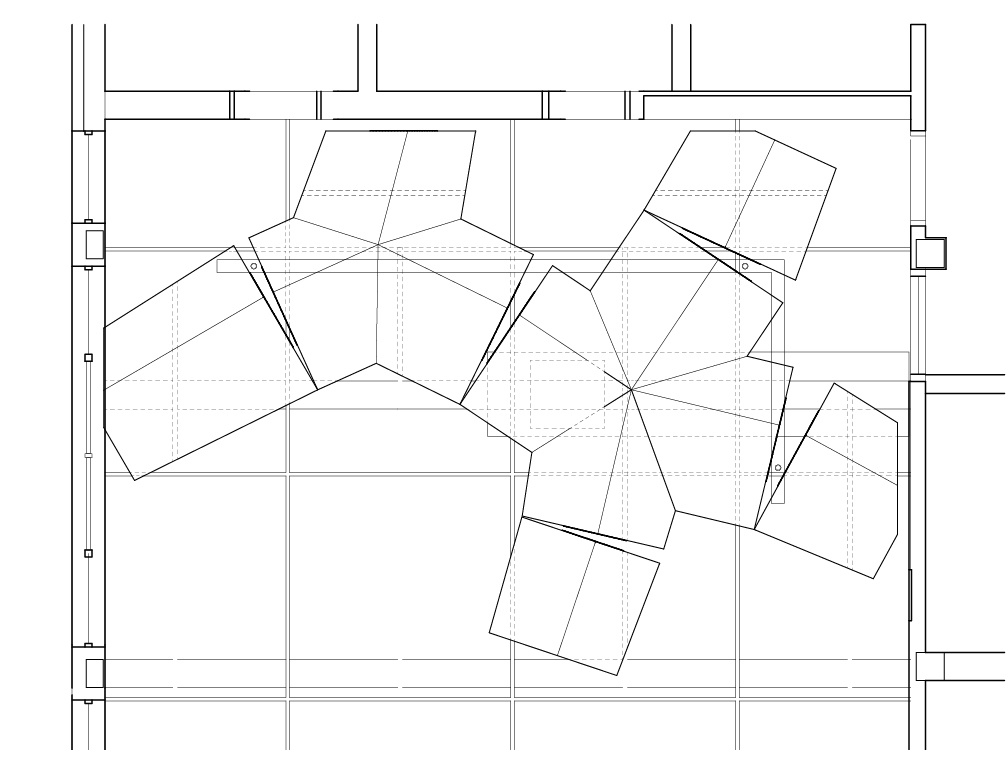
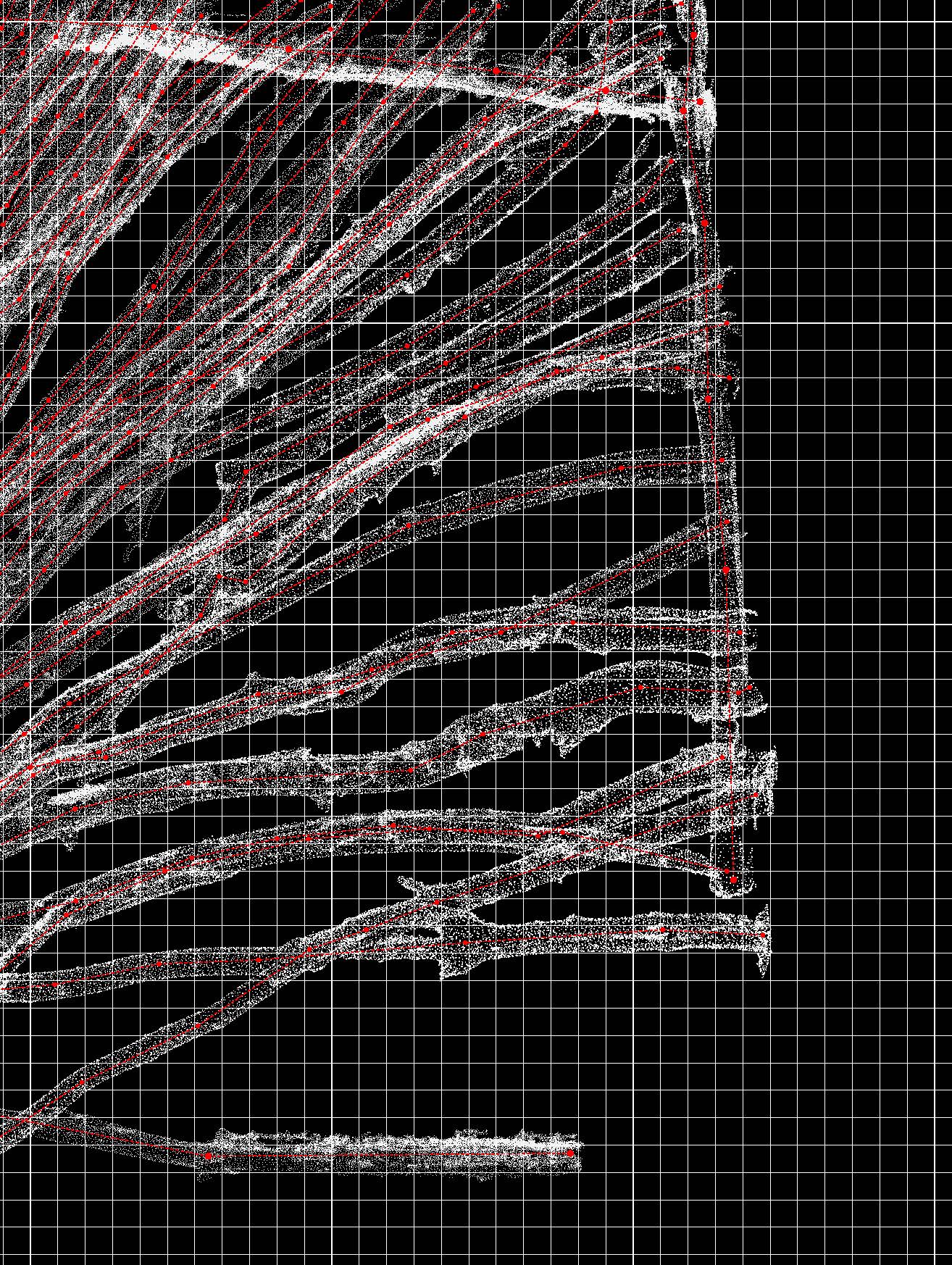
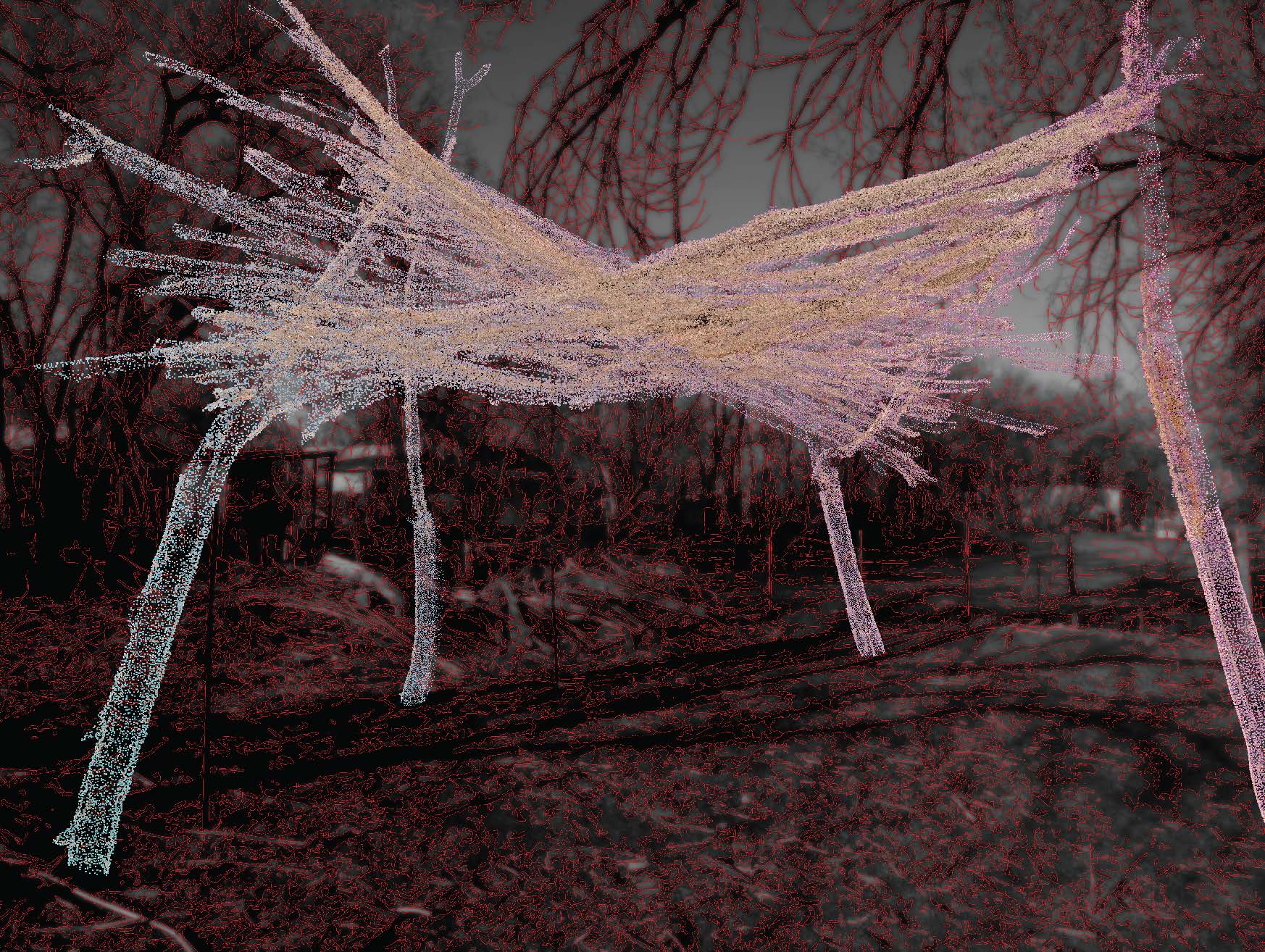
Timber Debris
Timber industries have become adept at using the whole log. The waste from large structural members is made into veneer and strand lumber while the sawdust is boiled into pulp and formed into sheets. Wood is standardized and deformations are smoothed out.
The architecture of the American Southwest has long used whole and minimally processed timber. Vigas, latillas, and coyote fences bare the traces of trees, forests, and imperfections. As increasingly severe storms, fires, and unpredictable weather decimate trees, debris is an increasingly pervasive material.
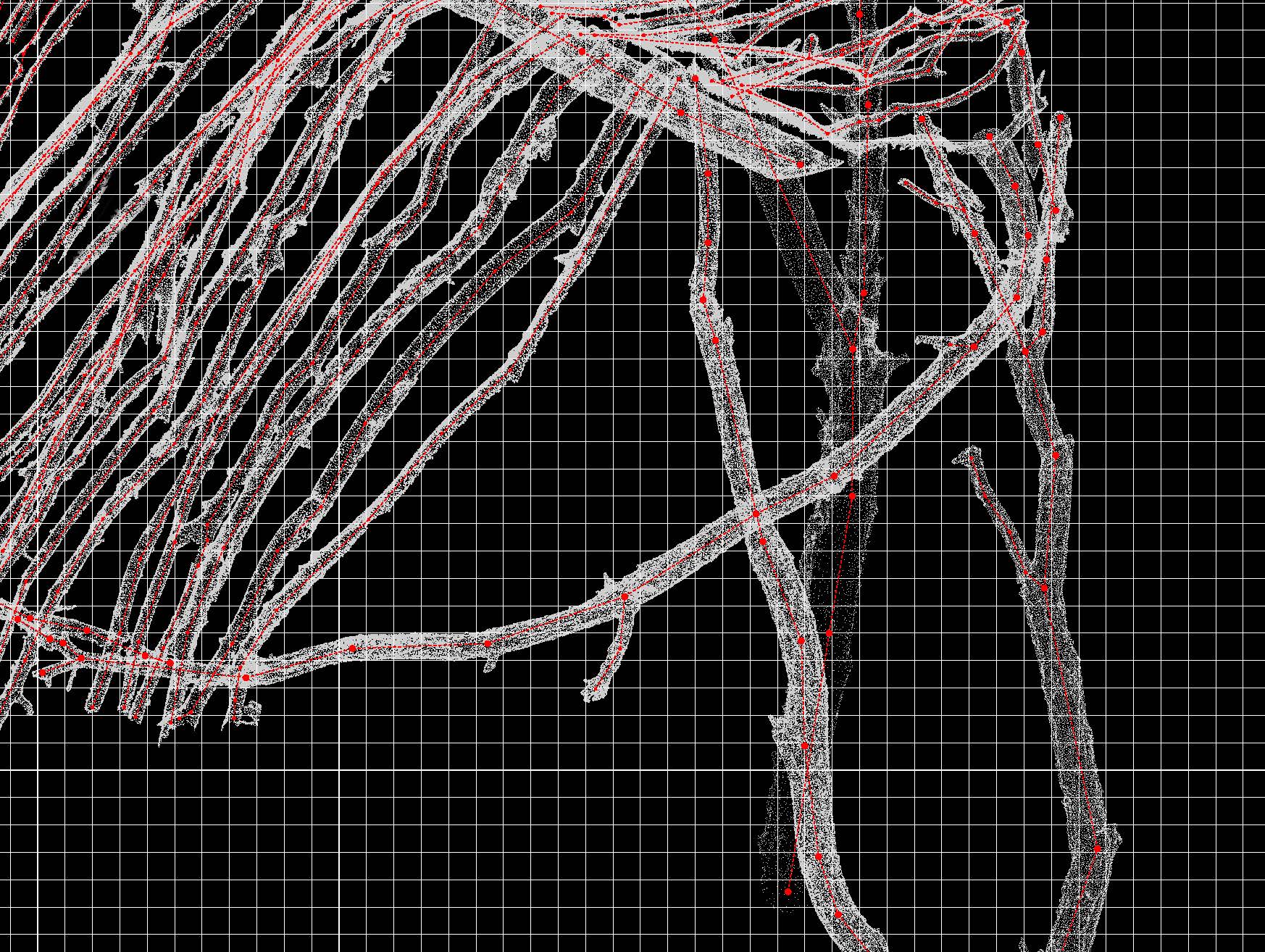

Debris Structures documents a series of works made using timber debris. Fall trees, branches, and timber wreckage are used to create a series of structures guided by their imperfections. In Debris Structures, computational design methods layer on long-standing building traditions to capture the specific properties of each piece. Timber is scanned, modeled, and put to work in irregular compositions. Presented as a series of digitally-generated prints, the structures shape an architecture of timber debris.
Exhibited in “Regenerative Actions”
Roswell Museum
April - October 2024
Exhibited in “Regenerative Actions”
Roswell Museum
April - October 2024



Courtesy of the Roswell Museum
2024